What is the current transformer?
The term current transformer is used to describe a piece of equipment consisting of pairs of mutually coupled windings mounted around a core, usually of magnetic materials. such transformers are normally used to step down high currents flowing in their primary windings to lower levels suitable for feeding to measuring and protective equipment.
Another good definition of what is a current transformer.
The current transformer is often treated as a “BlackBox”. It is a transformer that is governed by the laws of electromagnetic induction:
ε =k β Ac Nf (7.12)
ε = induced voltage
k = constant of proportionality
β = flux density
Ac = cross-sectional area
N = Turns
F = frequency
How does the current transformer work?
As previously stated, the CT is employed in series with the circuit to be monitored and it’s this difference that results in its ambiguous description. the primary winding is to bring a constant current source of supply through a low-impedance loop. Due to this low impedance, current passes through it with very little regulation. The CT operates on the ampere-turn principle:
primary ampere-turns = secondary ampere-turns, or
Ip Np = Is Ns
Since there is energy loss during transformation, this loss can be explained in ampere-turns: primary ampere-turns, magnetizing ampere- turns= secondary ampere-turns, or
Ip Np – Ie x Np = Is Ns
The CT is not voltage-dependent but it is voltage limited. As current passes through and impedance, a voltage is developed, V=IZ. As this occurs, energy is depleted from the primary supply, thus acting as a shunt. This depletion of energy results in CT errors.
As the secondary impedance increases, the voltage proportionally increases. Thus the limit of the CT is magnetic saturation, a condition where the CT core flux can no longer support the increased voltage demand.
At this point, nearly all of the available energy is going into the CT core, leaving none to support the secondary circuit.
Let’s learn how the current transformer works with the help of the equivalent circuit.
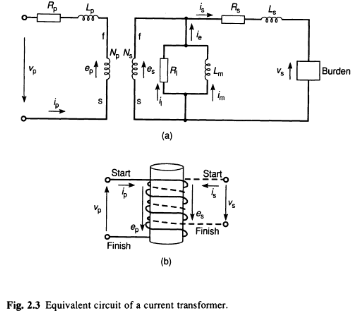
To understand how the current transformer works, one has to first understand the basic equivalent circuits. These transformers behave similarly to all two winding transformers and may be represented by the well-known circuit shown in figure 2.3(a) which is based on the winding directions and current and voltage polarities shown in figure 2.3(b).
Because the connected CT burdens are normally of the low impedance, the secondary output VA and voltage are relatively low, typically of a maximum of 20VA and 20V for a current transformer with a secondary winding rated at 1 ampere.
The voltage across the primary winding, because of the turns ratio, is not therefore likely to exceed a fraction of 1 volt, a negligible value relative to the rated voltage of the primary circuit.
For this reason, the equivalent circuit of a current transformer can be simplified to that shown in figure 2.4. This circuit can be made to represent any current transformer operating with any CT burden and primary current under either steady-state or transient conditions.
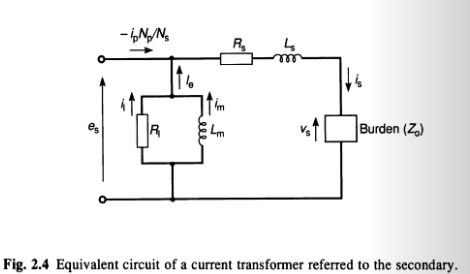
It will be seen that the exciting current Ie is dependent on the exciting impedance, presented by Rl in parallel with lm and the secondary E.M.F (Es) is needed to drive the secondary current Is through the total secondary circuit impedance.
Because the secondary current of a current transformer may vary over a wide range, that is from zero under no-load conditions to very large values but when there is a fault on the primary circuit the secondary E.M.F and excitation current may also vary greatly and in this respect, the behavior is very different from that of voltage transformers.
Because of the nonlinearity of the excitation characteristics of the magnetic materials used for current transformer (CT)cores, the exciting impedance of a given current transformer is not constant, and both the magnetizing inductance Lm and loss resistance R1 varying with the CT core flux needed to provide the secondary E.M.F.
Allowance may be made for this non-linearity, if necessary when determining the behavior of a particular Transformer under specified conditions, calculation than being done using step-by-step or other methods. If great accuracy is not required, however, simplifications can be affected by assigning constant values, the averages over a cycle, to Rl and Lm.
An alternative method of representing a current transformer is to employ the concept of mutual inductance MPs. By definition and based on the conventions used above:
when there is zero current in the secondary winding. It has been shown that the circuit shown in figure 2.5 is equally as satisfactory a model as that shown in figure 2.4.
The self-inductance, Loss of a secondary winding is given by:
in which Ls is the leakage inductance used in the circuit of figure 2.4. It is clear therefore that the value of Ls for a given Transformer may be determined experimentally by measuring itself Less and mutual inductances MPs.
Saturation curve in Current transformer
The saturation curve, often called the secondary excitation curve, is a plot of secondary exciting voltage versus secondary exciting current drawn on log-log paper. The units are in RMS with the understanding that the applied voltage is sinusoidal.
This characteristic defines the CT core properties after the stress relief annealing process. It can be demonstrated by a test that CT cores processed in the same manner will always follow this characteristic within the specified tolerances. Figure 7.14 shows a typical characteristic of a 600:5 multi-ratio CT. The knee point is indicated by the dashed line. Since the voltage is proportional to the turns, the volts per turn at the knee are constant.
The tolerances are 95% of saturation voltage for any exciting current above the knee point and 125% of exciting current for any voltage below the knee point.
These tolerances, however, can create a discontinuity about the knee of the curve, which is illustrated in figure 7.14. since the tolerance is referenced at the knee point, It is possible to have a characteristic that is shifted to the right of the nominal, within tolerance below the knee point.
But careful inspection shows that a portion of the characteristic will exceed the tolerance above the knee point. for this reason manufacturers, typical curves may be somewhat conservative to avoid this situation in regard to field testing. some manufacturers will provide actual test data that may provide the relay Engineer with more useful information.
knowing the secondary winding resistance and the excitation characteristic, the user can calculate the expected RCF under various conditions. using this type of curve is only valid for non-metering applications. the required voltage needed from the CT must be calculated using the total circuit impedance and the anticipated secondary current level. The corresponding exciting current is read from the curve and used to approximate the anticipated errors.
where,
Vex = secondary excitation voltage required at fault level
Isf = secondary fault current
Iex = secondary exciting current at Vex, obtained from curve
ZT = is the total circuit impedance
Rs = secondary winding resistance
RB = secondary burden resistance
XB = secondary burden reactance
RCF = ratio correction factor
RE = ratio error
In the world of protection, the best situation is to avoid saturation entirely. this can be achieved by sizing the CT knee point voltage to be greater than Vex, but this may not be the most practical approach. This could force the CT physical size to substantially increase as well as cause dielectric issues. There must be some reasonable trade-off to reach a desirable condition. equation 7.15 provides the voltage necessary to avoid AC saturation. if there is an offset that will introduce a DC component, then the system X/R ratio must be factored in:
(7.18)
And if the secondary CT burden is inductive, equation 7.18 is rewritten as:
(7.19)
The saturation factor Ks is the ratio of the knee point voltage to the required secondary voltage Vex. it is an index of how close to saturation a CT will be in a given application. Ks is used to calculate the time, a CT will saturate under certain conditions:
(7.20)
Where,
Ts = Time to saturate
ω = 2πf, where f is the system frequency
Ks = saturation factor,
R = primary system resistance at the point of fault
X = primary system reactance at point of fault
Ln = natural log function
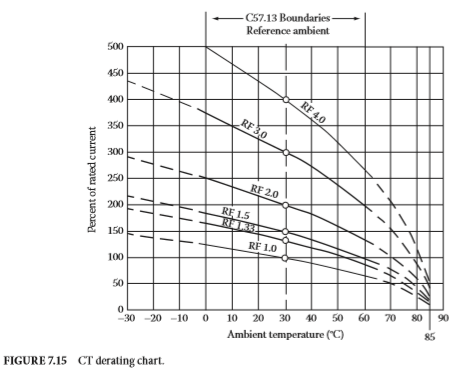
CT thermal rating factor in the current transformer
The continuous current rating factor is given at a reference ambient temperature, usually 30 degrees Celcius. The standard convention is that the average temperature rise will not exceed 55 degrees Celsius for general-purpose use, but it can be any rise shown in table 7.8. from this CT rating factor, a given CT can be derated for use in higher ambient temperature from the following relationship:
(7.21)
which can be simplified and written as:
where,
D F new = Desired rating factor at some other ambient temperature,
RF std = Reference rating factor at 30 degrees Celcius.
AMB new = desired ambient temperature at < 85 degrees Celcius.
Equation 7.22 is valid only for 55 degrees Celsius rise ratings and maximum ambient less than 85 degrees Celsius.
The rating factor ensures that the CT will not exceed its insulation class rating. this expression follows the loading curves of figure 1 in IEEE C57.13.It assumes that the average winding temperature rise is proportional to the current squared and those CT core watt losses are insignificant under continuous operating conditions.
Conversely, this expression will work for ambient temperature lower than 30 degrees Celsius, but in this situation, the rating factor will be higher. the concern is not with exceeding the insulation system but, rather with the chance of increasing the errors of the CT accuracy limits. A number of factors can affect this, such as CT core material and compensation methods used. it is best to consult the manufacturer for overrating performances.
Another consideration is the stated rating factor versus the actual temperature rise. in most cases, the stated rating factor may be quite less than the permitted 55 degrees Celsius rise allowance. for example, the actual rating factor maybe 2.67, but the stated rating factor is 2.0. if the actual rise data were known, then equation 7.22 could be rewritten as:
R F actual = rating factor at an actual temperature
∆Trise = actual measured temperature rise.
This may be more useful when operating a CT at a Higher ambient, where there is a need for the maximum rating factor. For example, if the CT has an actual rating of 2.67 based on temperature rise data but is only rated 2.0 and if it is desired to use the CT at 50 degree Celsius ambient with the stated rating factor 2.0, then this unit should work within its insulation rating and within its stated accuracy class.
If a higher temperature class insulation system is provided, then the rise must be in compliance with that class per table 7.8. In some cases, the temperature class is selected for the environment rather than the actual temperature rise of the CT.
Open circuit conditions in the current transformer CT functions best with the minimum CT burden possible, which would be its internal impedance. This can only be accomplished by applying a short circuit across the secondary terminals. since the CT core MMF acts like a shunt, with no load connected to its secondary, the MMF becomes the primary current, thus dividing the CT into hard saturation. with no load on the secondary to control the voltage, the winding develops an extremely high peak voltage. This voltage can be in the thousands or even tens of thousands of volts. This situation puts the winding under incredible stress, ultimately leading to failure. This could result in damage to other equipment or present a hazard to personnel. it is for this reason that the secondary circuit should never be open. it must always have a load connected.
If it is installed to the primary but not in use, then the terminals should be shorted until it is to be used. most manufacturers ship CTs with a shorting strap for wire across the secondary terminals. the CT winding must be able to withstand 3500 Vpeak for 1 minute under open-circuit conditions. if the voltage can exceed this level, then it is recommended that overvoltage protection be used.
Overvoltage protection in the current transformer
Under load, the CT voltage is limited. The level of this voltage depends on the turns and CT core cross-sectional area. the user must evaluate the limits of the CT burdens connected to ensure equipment safety. sometimes protective devices are used on the secondary side to maintain safe levels of voltage. these devices are also incorporated to protect the CT during an open circuit condition. In metering applications, it is possible for such a device to introduce a direct current across the winding that could saturate the CT core or leave it in some state of residual flux. in High Voltage equipment, arrestors may be used to protect the primary winding from high voltage spikes produced by switching transients or lighting.
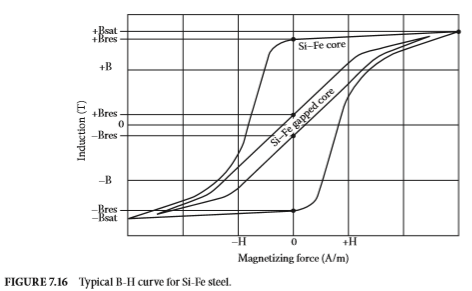
Residual magnetism in current transformerResidual magnetism, residual flux, or remanence refers to the amount of stored, or trapped, flux in the CT core. this can be introduced during heavy saturation or with the presence of some DC components. figure 7.16 shows a typical B-H curve for Silicon iron driven into hard saturation. The point at which the curve crosses zero force, identified by +Bres, represents residual flux. If at some point the CT is disconnected from the source, this flux will remain in the magnetic CT core until another source becomes present. If a fault current drove the CT into saturation, when the supply current resumes normal levels, the CT core would contain some residual components. Residual flux does not gradually decay but remains constant once steady-state equilibrium has been reached. Under normal conditions, the minor B-H loop must be high enough to remove the residual component. if it is not, then it will remain present until another fault occurrence takes place. the effective result could be a reduction of the saturation flux.
However, if a transient of opposite Polarity occurs, saturation is reduced with the assistance of the residual. conversely, the magnitude of the residual is also based on the polarity of the transient and the phase relationship of the flux and current. whatever the outcome, the result would cause a delayed response to the connected relay.
It has been observed that in a tape-owned toroidal CT core as much as 85% of saturation flux could be left in the CT core as a residual component. the best way to remove residual flux is to demagnetize the CT core.
This is not always practical. the user could select a CT with a class that is twice that required. this may not eliminate residual flux, but it will certainly reduce the magnitude. the use of hot-rolled Steel may inherently reduce the residual component to 40 to 50% of saturation flux.
Another way of reducing residual magnetism is to use an Air gapped CT core. normally the introduction of a gap that is, say 0.01% of CT core circumference could limit the residual flux to about 10% of the saturation flux. referring to Figure 7.16, a typical B-H loop for and Air gapped CT core is shown.
The drawback is significantly higher exciting current and lower saturation levels, as can be seen in figure 7.3. to overcome the high exciting current, the CT core would be made larger. that coupled with the gap would increase its overall cost. This type of CT core construction is often referred to as a linearized CT core.
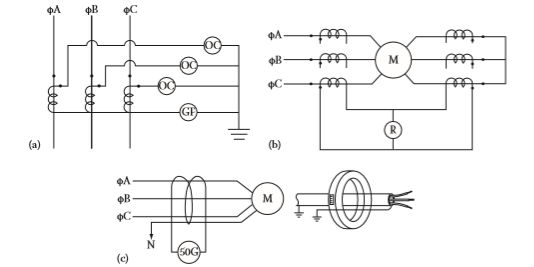
Let’s understand current transformer( CT) connections
As previously mentioned, some devices are sensitive to the direction of current flow. It is often critical in three-phase schemes to maintain proper phase shifting. Residually CT connections in a three-phase ground fault scheme sum to zero when the phases are balanced. The reversed polarity of a CT could cause a ground fault relay to trip under a normal balance condition. Another scheme to detect zero-sequence faults uses one CT to simultaneously monitor all leads and neutral in differential protection schemes. current source phase and magnitude are compared. The reverse polarity of a CT could effectively double the phase current flowing into the relay, thus causing a nuisance tripping of a relay. when two CTs are driving a three-phase ammeter through a switch, a reversed CT could show 1.73 times the monitored current flowing in the unmonitored circuit. In CT connections, the wye-connected secondary circuit is the most commonly used. the CT will reproduce positive negative and zero sequence elements as they occur in the primary circuit. in the delta-connected secondary, the zero sequence components are filtered and left to circulate in the delta.
This is a common scheme for differential protection of delta-wye transformers. A general rule of thumb is to construct the current transformer (CT) connections for secondaries in wye when they are on the Delta winding of a transformer and, conversely, connect the secondaries in Delta when they are on the wye winding of the transformer.
Related Topic –
- What Is A Diode? Working Principle & Types | Different Types Of Resistors
- What Is Synchronous Speed? | Types & Advantages Of DC Motors
- Working Principle Of Linear Variable Differential Transformer | Construction & Piezoelectric Transducers
- Three-Phase Induction Motor | 3-Phase Induction Motor Principle
- Introduction To Electrical Transformer | Definition, Construction & Parts Of A Transformer | Types Of Transformers
- DC Generator | Principle Of Operation, Construction, Types Of Generators & Application
- What Is DC Motor? | Principle Of DC Motor & Types Of DC Motors
- Diode-Circuits |Diode Convention, Transformer Rectifier & Objective Questions With Answer
